
Singularity-Free Orientation Estimation Using Inertial Sensor
Bachelor/Master Thesis
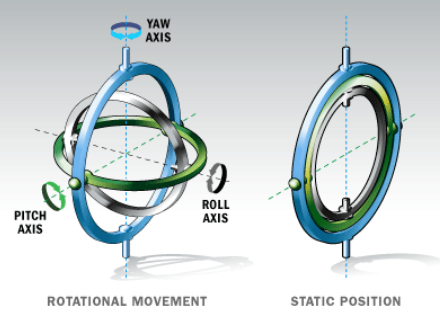
Orientation estimation from Inertial Measurement Unit (IMU) signal is a fundamental tool in several fields as activity recognition, rehabilitation robotics, surgical robotics and so forth. Among many parameterisations of attitude, only quaternions does not suffer from the problem of singularity, a.k.a. Gimbal lock. The singularity problem is the loss of one degree of freedom in a three-dimensional, three-gimbal mechanism that occurs when the axes of two of the three gimbals are driven into a parallel configuration, “locking” the system into rotation in a degenerate two-dimensional space.
Compared to quaternions, Euler Angles are simple and intuitive and they lend themselves well to simple analysis and control. This project aims to define a novel filter for singularity-free Euler angles-based orientation estimation. The validity of the method will be first demonstrated analytically and then empirically using free-living dataset from IMU sensor.
| Project type | Bachelor/Master Thesis |
| Work distribution | 50% Theory, 50% Data Analysis |
| Useful knowledge | Rigid Body Dynamics, Programming |
| Starting date | Immediate |
Contact

Dr. Giovanni Schiboni
- Job title: Researcher
- Phone number: +49 9131 85-23604
- Email: giovanni.schiboni@fau.de